YOLOv3笔记
学习内容来源:同济子豪兄的个人空间_哔哩哔哩_bilibili
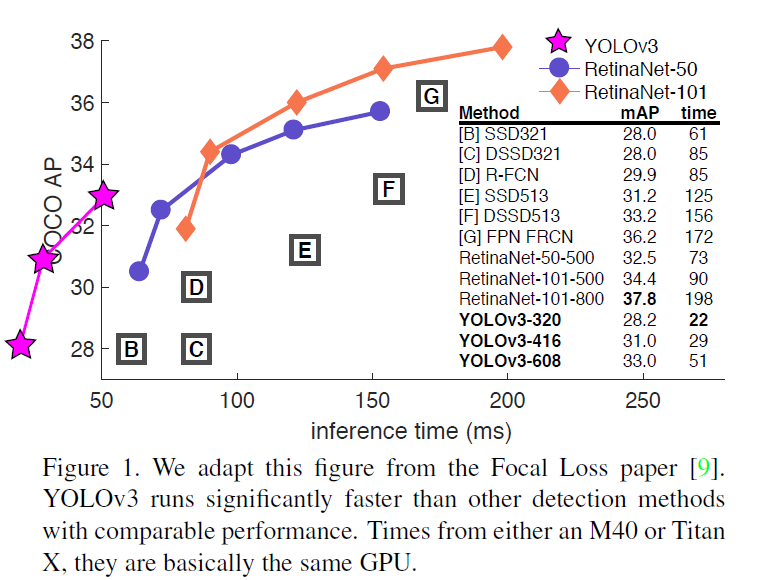 响应时间图
响应时间图
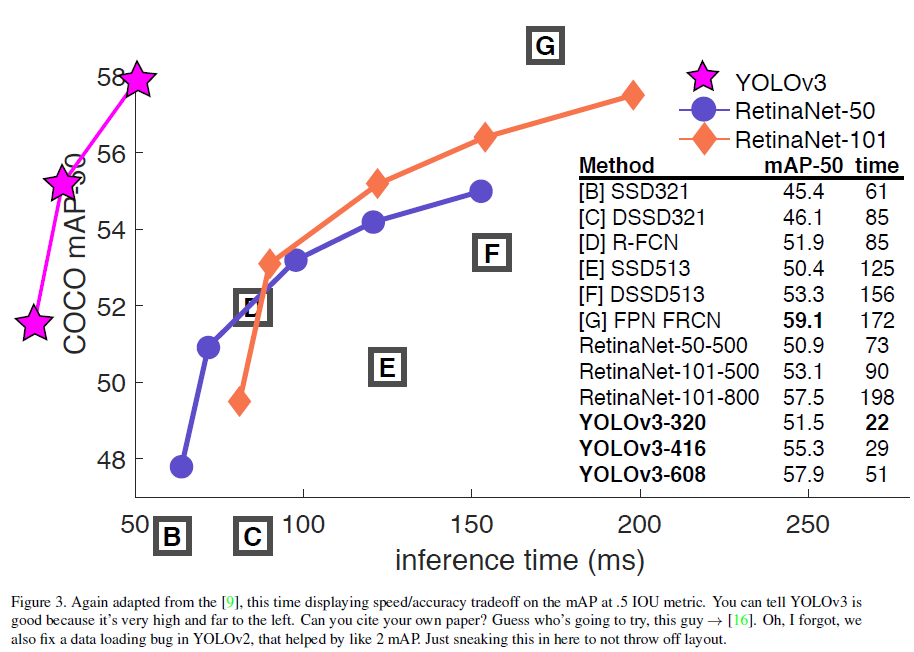 响应时间图2
响应时间图2
骨干网络
Darknet-53
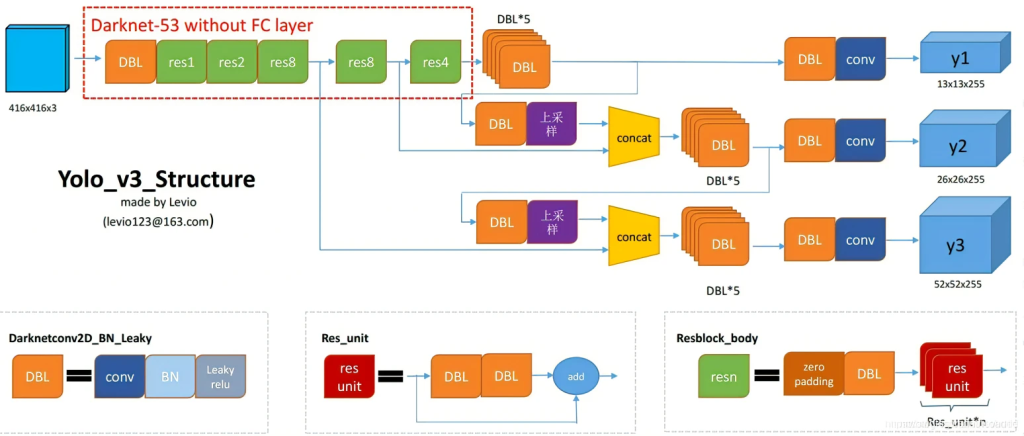 网络结构【目标检测】YOLOV3详解_Aliert的博客-CSDN博客
网络结构【目标检测】YOLOV3详解_Aliert的博客-CSDN博客
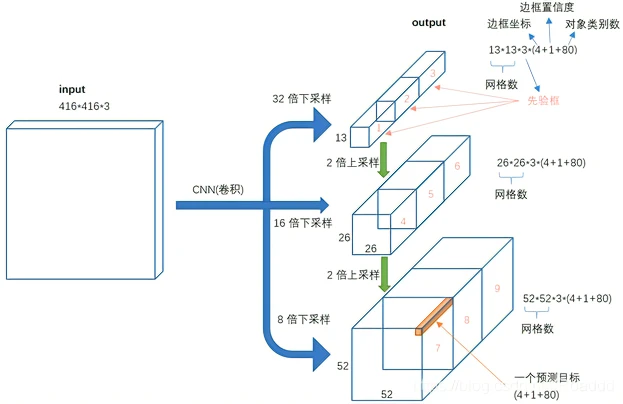 结构
结构
13*13的anchor负责预测大物体;
26*26的anchor负责预测中物体;
52*52的anchor负责预测小物体;
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 HUII's Blog!
相关推荐

2023-03-09
YOLOv2(YOLO9000)笔记
学习内容来源:同济子豪兄的个人空间_哔哩哔哩_bilibili 作者:Joseph Redmon, Ali Farhadi9000:九千多个类 相比于v1,v2添加了anchor,batch normalization,多尺度训练等。 模型演进 YOLOv1缺点 准确度低 定位性能差 recall低(检测出全部目标能力) 检测小目标、密集目标差 Batch Normalization批标准化强行将神经元的输出集中到0附近。 BatchNorm就是在深度神经网络训练过程中使得每一层神经网络的输入保持相同分布。 Batch normalization 的 batch 是批数据, 把数据分成小批小批进行随机梯度下降 ,而且在每批数据进行前向传递 的时候, 对每一层都进行 normalization的处理,。在全连接层和激励曾之间加入BN层。 在神经网络中, 数据分布对训练会产生影响. 比如某个神经元 x 的值为1, 某个 Weights 的初始值为 0.1, 这样后一层神经元计算结果就是 Wx = 0.1; 又或者 x = 20, 这样 Wx 的结果就为 2。现在还不能看出什么...
2023-02-12
YOLO v1笔记
学习内容来源:同济子豪兄的个人空间_哔哩哔哩_bilibili 作者介绍Joseph Redmon,You Only Look Once、YOLO9000、YOLOv3。 2020年起不再从事计算机视觉研究。 作者宣布停止CV研究 预测阶段(前向判断) YOLOv1结构 输入一个4484483的图像,经过一系列的卷积和池化操作,得到一个771024的feature map,将其拉平,送入4096个神经元的FC层中,输出结果输入到1470(7730)个神经元的FC层中,输出1470维向量,reshape成7730的tensor。 why7*7*30?论文中将图像划分为SS个网格,这里S取7。每个grid cell(网格)可以预测出B个bounding box(预测框,包含x,y【中心坐标】,h,w【宽高】,c【置信度confidence,包含物体的概率,用框线粗细表示,粗的置信度高】),这里B取2。**30=2\5+20。2:2个框;5:5个参数;20:Pascal VOC中20个类别的条件概率**(该grid cell在包含物体情况下是xx的概率)。 输出7730模...
2022-12-23
Fast R-CNN——RCNN系列算法Ⅱ
前言Fast R-CNN在VOC-07数据集上将检测精度mAP从58.5%提高到70.0%,检测速度比R-CNN提高了200倍。 从论文页数来看,Fast R-CNN仅9页,与R-CNN的21页相比,也“精简”了不少。 论文与源码原论文:Fast R-CNN (thecvf.com) 代码:rbgirshick/fast-rcnn: Fast R-CNN (github.com) Fast R-CNN论文 Girshick_Fast_R-CNN_ICCV_2015_paper下载 摘要 摘要 从摘要可以看出,Fast R-CNN采用了几项创新技术来提升训练与测试的速度和精度,与R-CNN相比,Fast R-CNN采用更深的VGG16,但训练速度快了9倍,测试速度快了213倍,并且获得了更高的均值平均精度(Mean Average Precision)。 结论 结论 Fast R-CNN是在R-CNN 和 SPPnet基础上进行升级的,并且提出“稀疏目标的建议似乎可以提高探测器的质量”。 介绍 现况介绍 作者认为前期的相关工作存在缓慢和不优雅的问题,主要原因是需要对对...
2022-12-21
R-CNN——RCNN系列算法Ⅰ
前言由于基于深度学习的方法较传统方法相比,准确率有了较明显的提升,故只学习基于深度学习方法的目标检测。 RCNN系列算法将从论文着手,结合其他资料,学习R-CNN、 Fast R-CNN、Faster R-CNN。 R-CNN的全称是Region-CNN,是第一个成功将深度学习应用到目标检测上的算法。R-CNN基于卷积神经网络(CNN),线性回归,和支持向量机(SVM)等算法,实现目标检测技术。[ref] R-CNN_百度百科 (baidu.com)[/ref] 论文与源码原论文:1311.2524.pdf (arxiv.org) 代码:rbgirshick/rcnn: R-CNN: Regions with Convolutional Neural Network Features (github.com) R-CNN论文 R-CNN下载 摘要 摘要 摘要首先开门见山地指出与之前传统方法相比,R-CNN一下子将平均精度提高了30%(至53.3%),可见其有效性。 指出了本文的两个要点:① 高容量卷积神经网络自底向上,以便定位和分割对象;② 当标记的训练数据稀少时,用于辅助...
2022-12-27
Faster R-CNN——RCNN系列算法Ⅲ
前言Faster R-CNN可以算是深度学习目标检测领域的祖师爷了,至今许多算法都是在其基础上进行延伸和改进的,它的出现,可谓是开启了目标检测的新篇章。【深度学习】详解Faster-R-CNN_风度78的博客-CSDN博客 论文与源码原论文:1506.01497.pdf (arxiv.org) 代码链接:jwyang/faster-rcnn.pytorch: A faster pytorch implementation of faster r-cnn (github.com) Faster R-CNN论文 Faster-R-CNN下载 摘要 摘要 论文开篇提到最先进的目标检测网络依赖于区域建议算法来假设目标位置。前人的工作,诸如SPPnet和Fast R-CNN的加速工作都在“检测网络”上,“区域候选”的计算则成了性能瓶颈。 Faster R-CNN论文提出了能够与检测网络分享全图卷积特征的RPN(Region Proposal Network,区域候选网络),能够几乎零成本地实现区域候选。RPN是一个全卷积网络,它同时预测每个位置的对象边界和得分。 RPN被端到端地训练...
2022-12-20
图像目标检测基本概念与算法
目标检测任务概述机器视觉的中心任务是从图像中解析出可供计算机理解的信息。根据后续任务的需求,可将其分为四个主要层次:分类(Classification)、定位(Location)、检测(Detection)、分割(Segmentation)必读!计算机视觉四大基本任务(分类、定位、检测、分割) (qq.com)。 分类(图a)、定位、检测(图b)、语义分割(图c)、和实例分割(图d) 分类任务关心图像整体,给出整张图像的内容描述即可,而检测则关心特定物体目标,要求同时获得目标类别信息和位置信息。 图像检测 发展沿革 目标检测发展沿革 目标检测究竟发展到了什么程度?| 目标检测发展22年 - 知乎 (zhihu.com) 阶段一:传统目标检测方法传统检测算法流程可概括如下: 选取感兴趣区域,选取可能包含物体的区域 对可能包含物体的区域进行特征提取 对提取的特征进行检测分类 传统检测流程 较为知名的传统方法有:Viola Jones Detectors、HOG Detector、Deformable Part-based Model (DPM)[目标检测的传统方法概...
评论