YOLO v1笔记
学习内容来源:同济子豪兄的个人空间_哔哩哔哩_bilibili
作者介绍
Joseph Redmon,You Only Look Once、YOLO9000、YOLOv3。
2020年起不再从事计算机视觉研究。
预测阶段(前向判断)
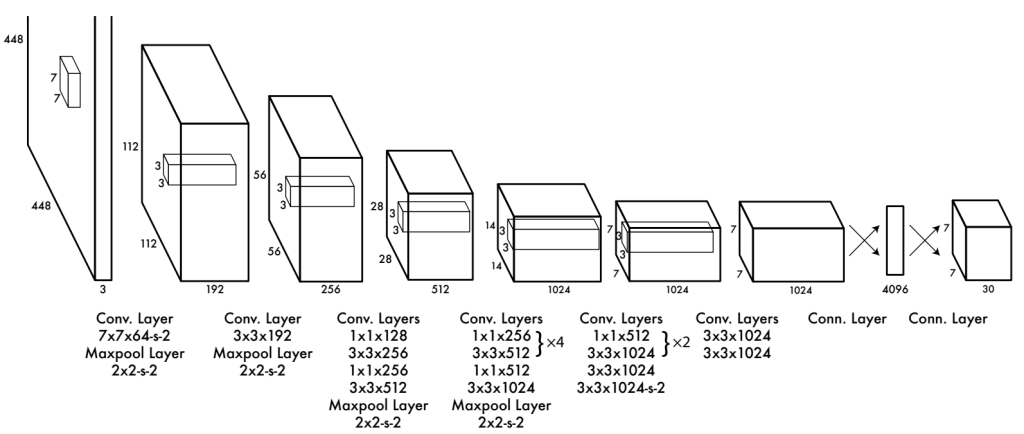
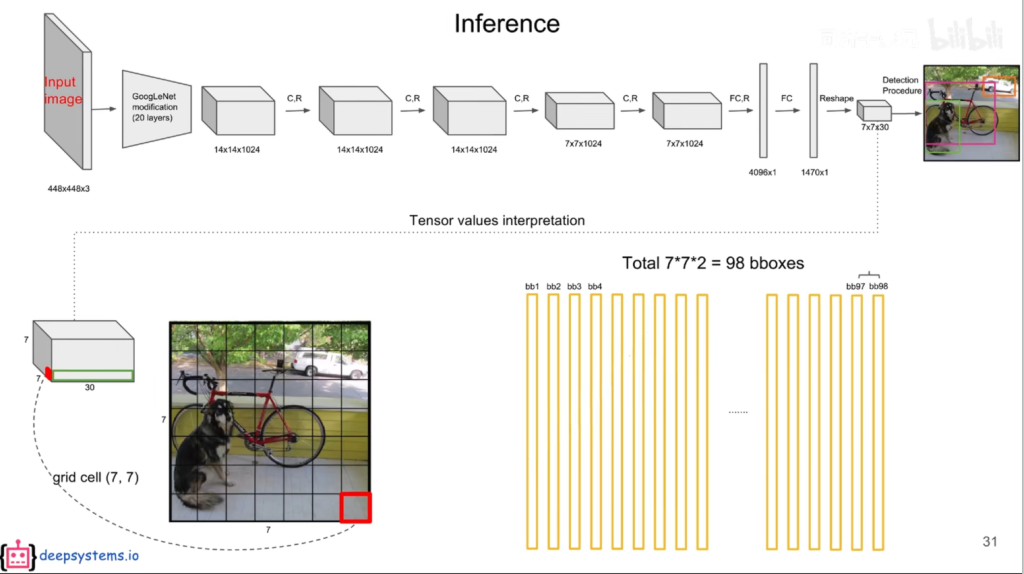
输入一个4484483的图像,经过一系列的卷积和池化操作,得到一个771024的feature map,将其拉平,送入4096个神经元的FC层中,输出结果输入到1470(7730)个神经元的FC层中,输出1470维向量,reshape成7730的tensor。
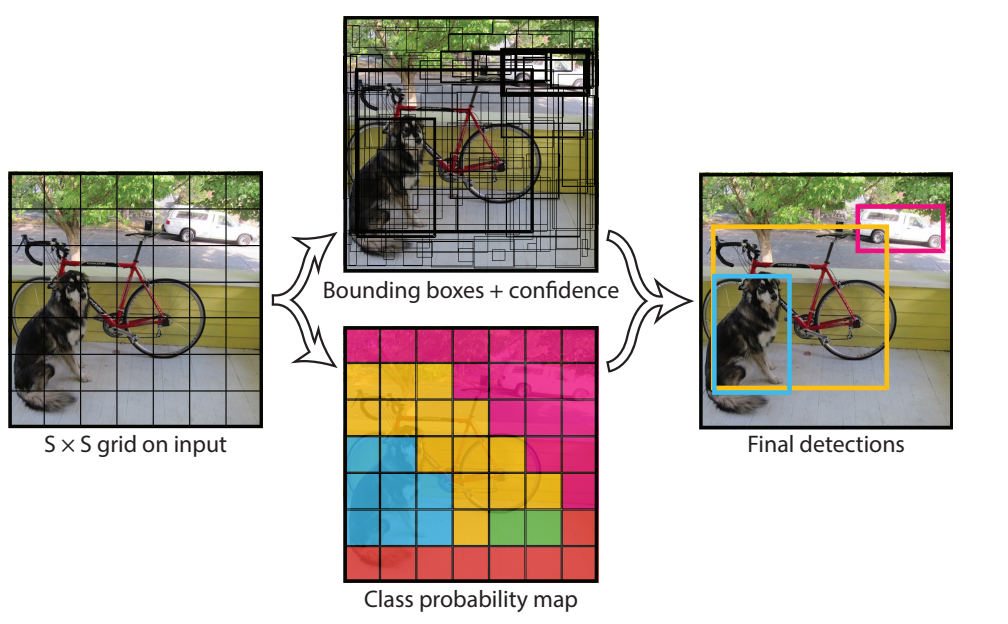
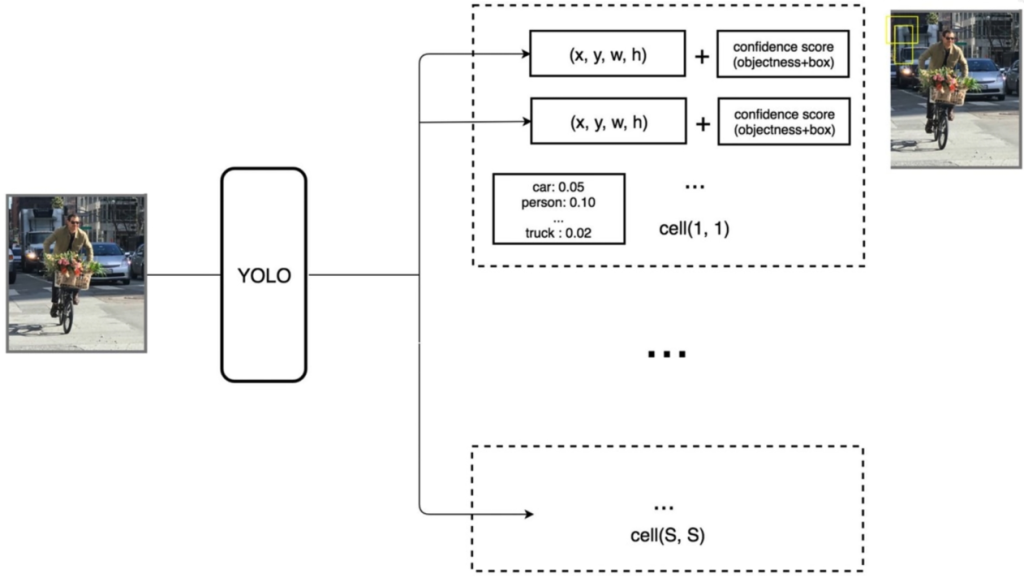
why7*7*30?论文中将图像划分为SS个网格,这里S取7。每个grid cell(网格)可以预测出B个bounding box(预测框,包含x,y【中心坐标】,h,w【宽高】,c【置信度confidence,包含物体的概率,用框线粗细表示,粗的置信度高】),这里B取2。**30=2\5+20。2:2个框;5:5个参数;20:Pascal VOC中20个类别的条件概率**(该grid cell在包含物体情况下是xx的概率)。
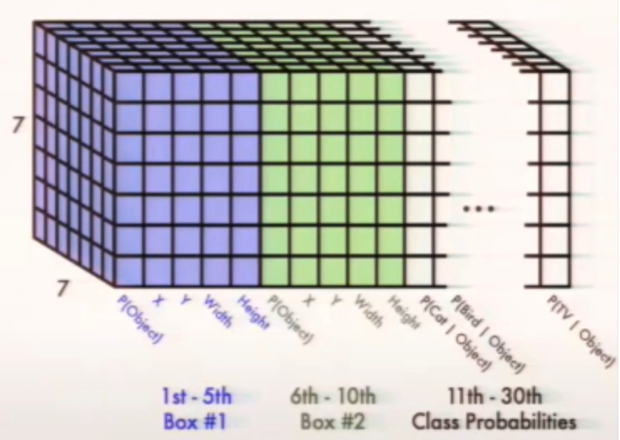 输出7730模型结构
输出7730模型结构
如何定义bounding box是属于这个grid cell?只要该bounding box的中心是在这个grid cell中即可。
当框内含有物体时,能计算某物体概率。将每个bounding box的置信度×条件概率,获得每个bounding box各类别的概率。值得注意的是,每个grid cell只能预测一个物体,77最多只能识别*49个物体。
预测阶段后处理——NMS非极大值抑制
使用bounding box的置信度,即该box中存在物体的概率,乘以是该种物体的条件概率,得到该种物体的全概率。因此每个grid cell可以得到2个20维的全概率,或者说每个种类有772=98个概率,最终生成772*20个概率。
对于小于阈值(如0.2)的值直接设为0。
对于非0
当两个框的交并比IoU(两个框的并部分/两个框的交部分)>0.5时,可以认定两个框重复识别了同一个物体,将低概率的框去除(将其条件概率置为0),否则暂时将其保留,继续进行比较,直至将98个bounding box比较完,最后保留n个框。
注意,NMS操作仅在预测阶段进行!
训练阶段(反向传播)
每个grid cell只能代表一个物体,因此最多有49个物体。当ground-truth的中心点落在grid cell中时,生成的两个bounding box中,只使用与ground-truth的IoU较大那个进行拟合物体,另一个则弃之不用。当ground-truth中心点不在grid cell中,则直接放弃这两个bounding box。
损失函数
损失函数由5部分组成。
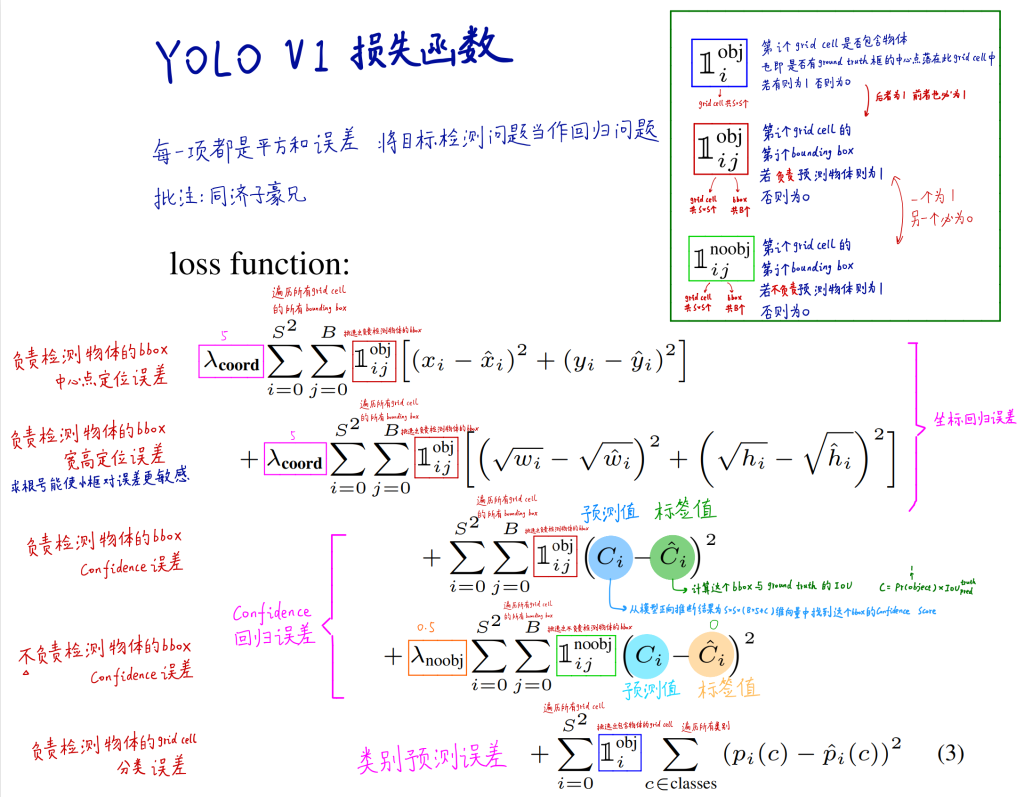
5项均为回归问题的损失函数,其中
- 式1:负责检测物体的bbox中心点定位误差;
- 式2:负责检测物体的bbox宽高定位误差,其中求根号能使小框对误差更敏感,大框的偏差减小,对大框更公平;前两项是对坐标回归误差;
- 式3:负责检测物体的bbox 的置信度confidence误差,标签值即为bbox和ground truth的IoU,越接近1越好;
- 式4:不负责检测物体的bbox 的置信度confidence误差,越接近0越好;3、4是置信度回归误差;
- 式5:负责检测物体的grid cell分类误差,即类别预测误差。
权重设置:对于负责定位检测的${\lambda}{coord}$取5,不负责检测物体的${\lambda}{noobj}$则取0.5。
值得注意的是,负责检测物体的$\mathbb{1}^{obj}{i}$与$\mathbb{1}^{obj}{ij}$同为0/1,而$\mathbb{1}^{noobj}_{ij}$则相反。
论文细节
对比其他目标检测方法,在实时目标检测中,YOLO是最准的,在非实时目标检测中,YOLO是最快的。初代版本YOLO的精度位于R-CNN与Fast R-CNN之间,但其速度很快,FPS达到45。
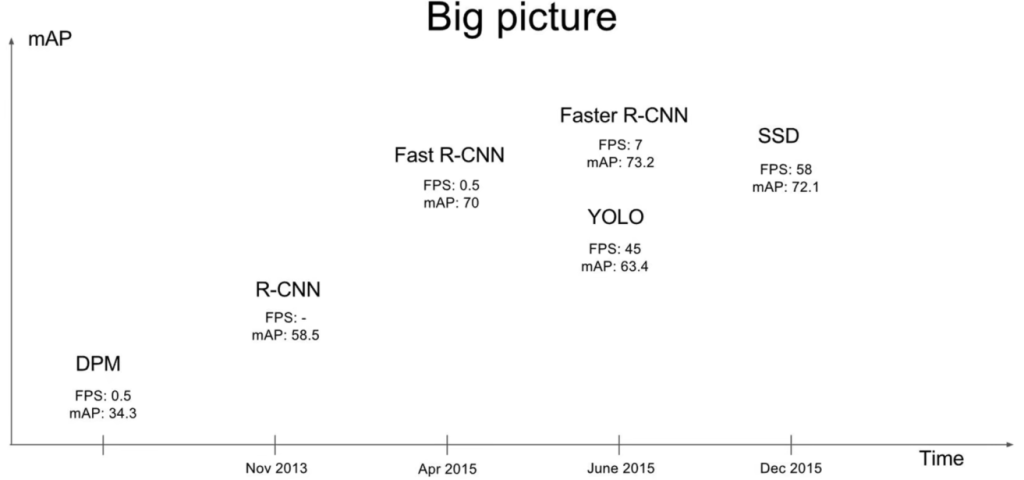
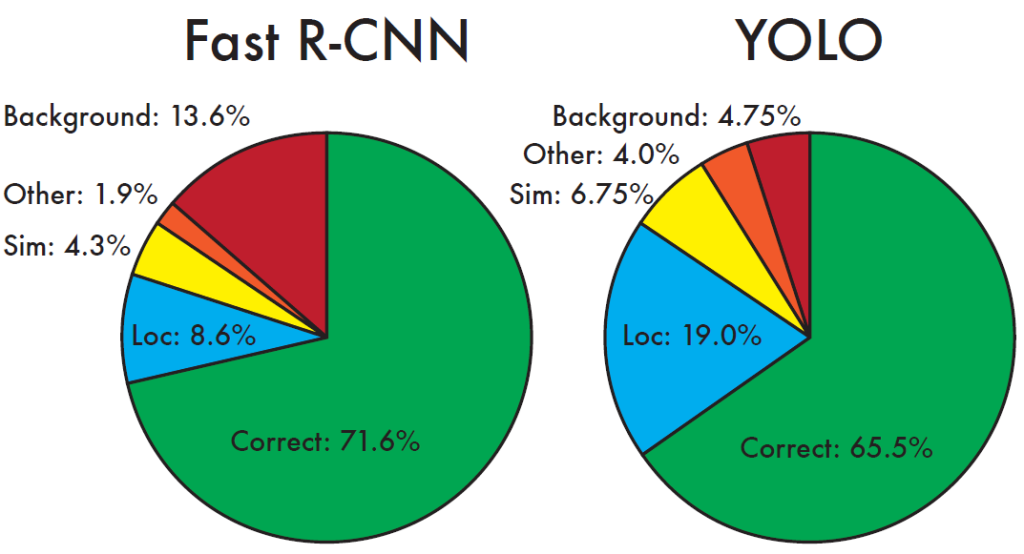
Fast R-CNN只能看到RoI,区分背景能力差,但是精确定位性能好;YOLO能看到全图,区分背景和物体能力强,但精确定位能力差。
论文精读
Two stage的算法是先提取候选框,再对其进行甄别,而YOLO则是直接输出检测结果。
V1-V3版本的作者均为Joseph Redmon。
